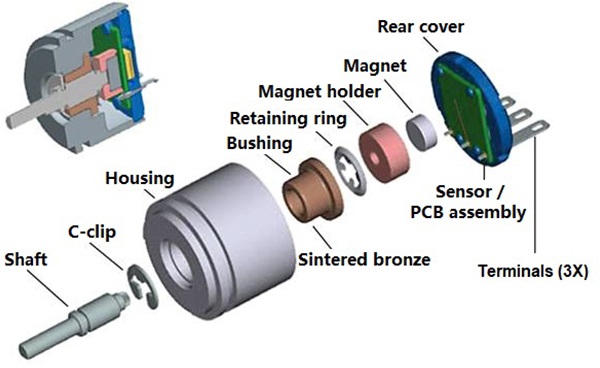
Si facultas discurrendi magneticam encoder gyratorium habes, fere videbis structuram internam sicut ea quae supra demonstratum est. Encoder magneticus constat ex harundo mechanico, structura conchae, coetu PCB in fine encoder, et parvadiscus magnetisrevolventis hastili in fine mechanica scapus.
Quomodo encoder magneticus metitur feedback rotationis positionis?
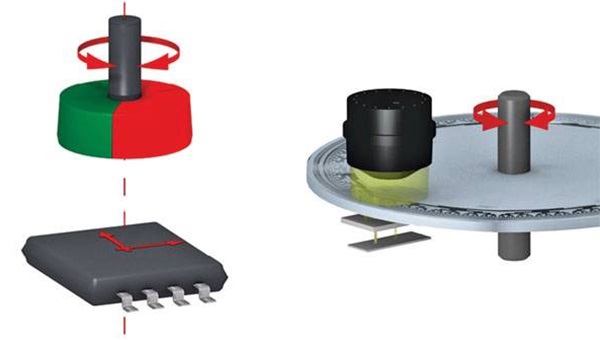
Aula Effectus: productio differentiae potentialis per conductorem currens in electrico gerendo, cum campus magneticus applicatur ad directionem perpendicularis fluitantis currentis.
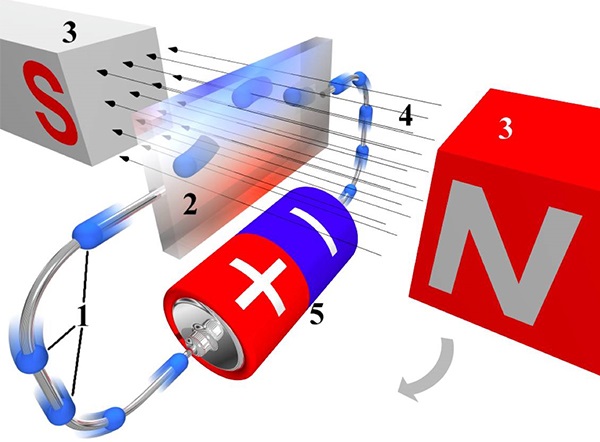
Si campus magneticus ad conductorem applicatus revolvatur in directione a sagitta supra demonstrata cum currenti via ut axis, Aula differentia potentiale mutabitur propter angulum mutationem inter campum magneticum et conductorem, et mutatio inclinatio differentiae potentialis est curva sinusoidalis. Ergo, in intentione conductoris agentis utrinque fundata, angulus gyrationis campi magnetici vicissim computari potest. Haec est fundamentalis operatio mechanismi encoder magnetici cum motus rotationis positionem feedback.
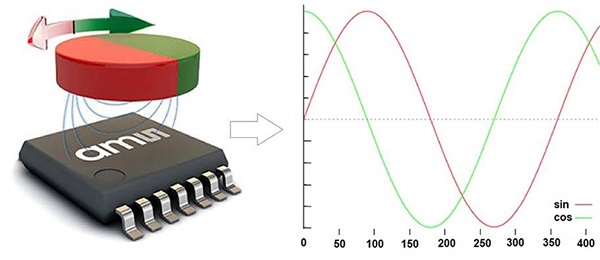
Simili principio, quod resolvens duas lineas perpendiculares gyros, duo (vel duo paria) inductionis elementorum cum perpendicularis venae directionum mutuam adhibet, requiruntur etiam in encoder magnetico ut unicam correspondentiam curet inter positionem rotationis campi magnetici. and the output voltage (combination).
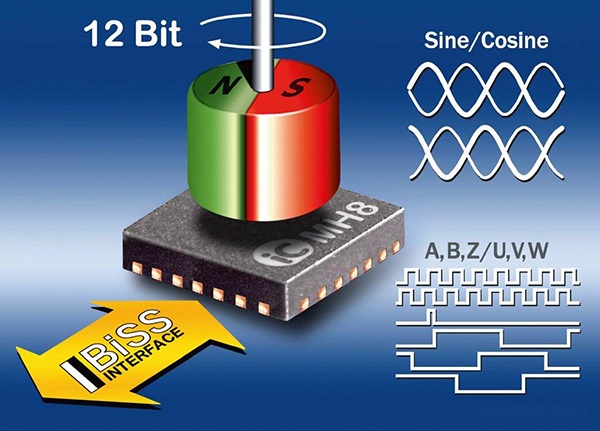
Hodie, Hall sensoriis adhibitis in encoders magneticis plerumque altam partem integrationis habent, quae non solum aulae semiconductoris integrat et signo processus et circuitus ordinandi affines, sed etiam varias formas signorum output modulorum integrant, sicut sinum et cosinum analogum. annuit, fluctus quadratus gradu digitali significationibus vel bus communicationis output auget.
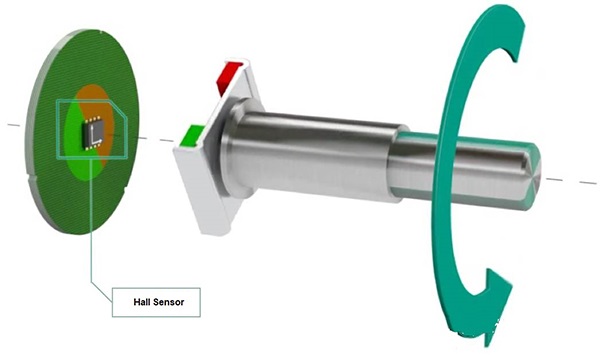
Hoc modo, magnetem permanentem instar Neodymiae sinteretae magnetis, qui campum magneticum in fine encoder spiculi rotationis generat, pone aulam sensorem chip supra memoratum in tabula circuitionis PCB, et accede ad finem encoder magnetem permanentem. hastile secundum certas necessitates (directionem et distantiam).
In dividendo signum intentionis ab aula sensoris per PCB tabulam circuii, positio rotativa rotoris encoder cognosci potest.
Structura et principium operandi encode magneticae determinat de hoc permanente magnete permanenti requirenda, exempli gratia magnetis materialis, figura magnetis, directionis magneticae, ordinarie etc.e diametro magnetediscus est optimus optio magnetis. Magnetici Ningbo Horizontis periti sunt in fabricandis encomiis magneticis cum aliquibus magnitudinibus praestandisdiametro Neodymium orbis magnetum, D6x2.5mm et D10x2.5mm diametri discus Neodymii magnetum, quorum exempla sunt maxime popularia.
Videri potest quod comparatum cum encoder optical traditum, encoder magneticum non egere codici complexi orbis et luminis, numerus partium minor est, et structura detectio simplicior est. Etiam elementum ipsum Aula multa commoda habet, ut firma structura, parvitas, leve pondus, longus usus vitae, vibrationis resistentia, ne pulvis, oleum, vaporum et sal nebula pollutio vel corrosio insidiantur.
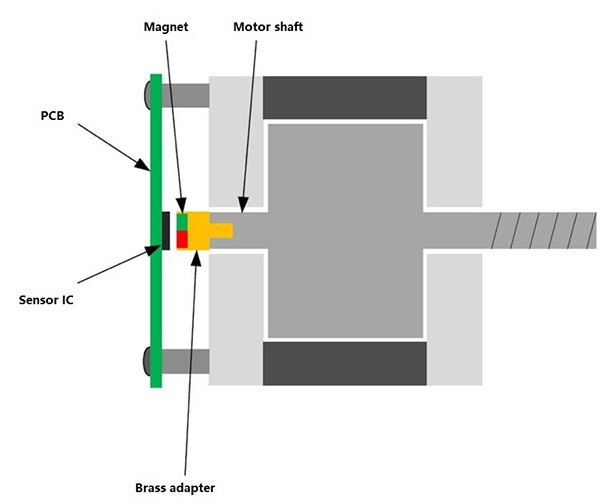
Cum technologia encoder magnetica applicatur ad rotationem positionis opiniones motoris electrici, thesintered NdFeB cylindrici magnetisencoder magneticae in fine scapus motoriis directe institui potest. Hoc modo potest tollere iuncturam transeuntem (vel copulationem) requisitam cum utens opiniones traditionales encoder, et positionem contactus sine contactu mensurationis consequi, quae periculum encoder defectionis (vel etiam damni) minuit ob vibrationem sagittae mechanicae in tempore operatio motoris electrici. Ideo adiuvat ad stabilitatem electrica motoris operationis emendandam.
Post tempus: Iul-21-2022